Abstract Linear Algebra 35 | Definition of Jordan Normal Form
Based on The Bright Side of Mathematics's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Every complex square matrix A is similar to an upper-triangular Jordan normal form J via A = X J X^{-1} for some invertible X.
Briefing
Jordan normal form is the canonical matrix form that every linear operator on a complex vector space can be reduced to via a change of basis, even when diagonalization fails. For any square matrix A with complex entries, there exists an invertible matrix X such that A = X J X^{-1}, where J is a special upper-triangular matrix whose diagonal entries are exactly the eigenvalues of A. This matters because diagonalization only works when there are enough linearly independent eigenvectors; Jordan normal form supplies the missing structure when eigenvectors are insufficient.
The key idea is that Jordan normal form generalizes diagonal matrices. If A is diagonalizable, then its Jordan normal form is simply a diagonal matrix. But when A has an eigenvalue with too small an eigenspace, diagonalization breaks down, and J develops “Jordan blocks” that encode how the operator behaves on generalized eigenvectors.
A simple 2×2 example shows the contrast. When a matrix has two distinct eigenvalues (like 2 and 3), there are enough eigenvectors to form a basis, so the matrix is diagonalizable and can be transformed into a diagonal form. The situation changes when there is only one eigenvalue. For instance, with a matrix having only eigenvalue 2, diagonalizability would require a two-dimensional eigenspace. Instead, the eigenspace is computed as ker(A − 2I). In the example, ker(A − 2I) ends up one-dimensional, meaning there are not enough eigenvectors to span the whole space; the matrix is not diagonalizable.
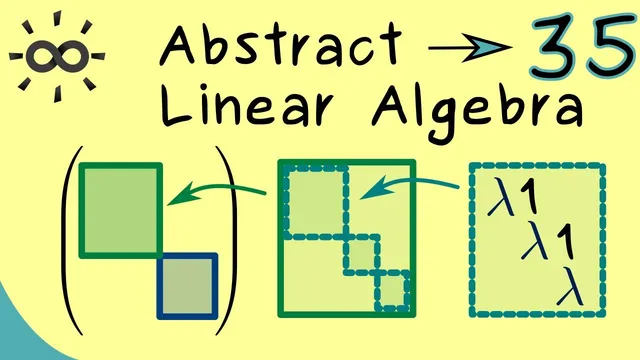
In that non-diagonalizable case, the Jordan normal form already appears in the matrix’s structure: the Jordan form is upper triangular with the eigenvalue on the diagonal and ones on the superdiagonal, while all other entries are zero. This pattern is the prototype for the general definition.
Formally, a Jordan normal form J is built from Jordan blocks arranged along the diagonal. J decomposes into square blocks J1, J2, …, JR, where each block corresponds to one eigenvalue and has its own internal structure. Each Jordan block is itself composed of Jordan boxes (smaller square pieces) along its diagonal. Inside a Jordan box, the eigenvalue λ_i sits on the diagonal, and within a larger block, ones appear on the first superdiagonal (except at the top of the block), with zeros elsewhere. Jordan boxes can have different sizes, including 1×1 boxes, which correspond to the “fully diagonal” situation.
An illustrative 9×9 example uses eigenvalues 4 and −3. The Jordan normal form splits into two Jordan blocks J1 and J2, one for each eigenvalue. Within each Jordan block, the sizes and counts of Jordan boxes reflect how many directions are missing from the eigenspaces: larger boxes indicate a greater deficiency compared with the diagonal case, where only 1×1 boxes would occur. The mechanism for turning A into J is saved for later, but the definition and structural meaning of the blocks are laid out here as the foundation for that construction.
Cornell Notes
Jordan normal form provides a guaranteed “best possible” matrix representation for any square complex matrix A: there is an invertible X with A = X J X^{-1}, where J is upper triangular. The diagonal of J lists the eigenvalues of A, and the remaining structure is organized into Jordan blocks. Each Jordan block corresponds to a single eigenvalue and is built from Jordan boxes whose sizes determine how far A is from being diagonalizable. When A is diagonalizable, every Jordan box is 1×1, so J becomes diagonal; when eigenspaces are too small, larger Jordan boxes and ones on the superdiagonal appear. This block-and-box structure encodes the missing eigenvector directions via generalized eigenvector behavior.
Why does diagonalization fail for some matrices with a repeated eigenvalue?
What structural features define a Jordan normal form matrix J?
How do Jordan blocks relate to eigenvalues?
What do the sizes and counts of Jordan boxes tell you?
How does the 2×2 example illustrate the Jordan form pattern?
Review Questions
- Given an eigenvalue λ of A, how do you compute the eigenspace and what does its dimension determine about diagonalizability?
- Describe the location of eigenvalues, ones, and zeros in a Jordan box and explain how this scales up to a Jordan block.
- In a Jordan normal form, what does it mean if a Jordan block contains a Jordan box larger than 1×1?
Key Points
- 1
Every complex square matrix A is similar to an upper-triangular Jordan normal form J via A = X J X^{-1} for some invertible X.
- 2
The diagonal entries of J are exactly the eigenvalues of A, including multiplicities reflected through the block structure.
- 3
Diagonalization is a special case: if A is diagonalizable, its Jordan normal form is diagonal with only 1×1 Jordan boxes.
- 4
When an eigenvalue λ has an eigenspace ker(A − λI) that is too small, diagonalization fails and Jordan blocks with ones on the superdiagonal appear.
- 5
A Jordan normal form is organized into Jordan blocks along the diagonal, and each Jordan block corresponds to a single eigenvalue.
- 6
The sizes and counts of Jordan boxes indicate how many eigenvector directions are missing, with larger boxes signaling greater deficiency from the diagonalizable case.