But what is a convolution?
Based on 3Blue1Brown's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Convolution of two discrete sequences produces a new sequence where each output entry is a sum of products over all index pairs that add to a fixed offset.
Briefing
Convolution is the mathematical “mixing” operation that turns two lists (or two functions) into a new list by multiplying aligned pairs and summing them—an idea that starts in probability, becomes a workhorse in image processing, and ultimately enables fast algorithms like FFT-based convolution.
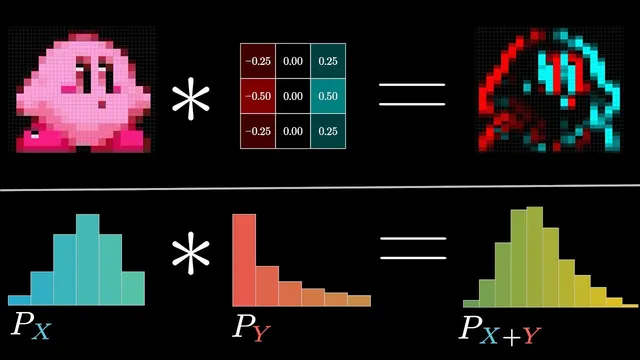
The core definition is built from a simple probability picture: roll two dice and ask for the chance of each possible sum. With fair dice, counting how many outcome-pairs land on each diagonal in a grid reveals the distribution. The same question can be reframed by flipping one list of probabilities and sliding it across the other; each shift lines up pairs whose indices add to a fixed value. When the dice are not uniform, the probability of a particular sum becomes a sum of products: for each way to write the sum as i+j, multiply the probability of i on one die by the probability of j on the other, then add across all such pairs. That “sum of products across index offsets” is convolution in discrete form.
From there, convolution generalizes naturally beyond dice. In a 1D moving average, a short kernel (for example, five values each equal to 1/5) slides across a longer signal; at each position, the output is the weighted sum of the nearby inputs. The weights determine how much each neighbor contributes, so the result is a smoothed, simplified version of the original data. In two dimensions, the same mechanism blurs images: a small 3×3 or 5×5 kernel is multiplied against the pixels under it, channel by channel (RGB treated as three small vectors), producing a new pixel value. A Gaussian-shaped 5×5 kernel emphasizes the center and downweights edges, creating blur that mimics the optical effect of defocus.
Convolution also captures structure, not just smoothing. Using kernels with positive and negative values can produce edge detection: when the kernel sums to zero, uniform regions cancel out, while changes across the image create strong positive or negative responses. Rotating the kernel changes which direction of edges are emphasized—vertical edges for one orientation, horizontal edges for another—so a carefully chosen “nucleus” (kernel) becomes a detector for specific visual features.
A practical complication is output size: mathematically, convolution often yields a longer array than the inputs, so implementations may crop or pad depending on the goal. Another subtlety is the kernel flip: the standard mathematical definition aligns with reversing the second sequence before sliding, even though many programming libraries hide this detail.
Finally, convolution’s computational cost motivates a major algorithmic leap. Naively, convolving two length-n sequences requires O(n²) pairwise products. But when the operation is reinterpreted through polynomial multiplication and evaluated at special points—specifically the roots of unity—FFT turns convolution into a sequence of faster steps: compute FFTs of both inputs, multiply pointwise, then apply the inverse FFT. This reduces runtime to O(n log n) while producing the same result, making convolution feasible at the scale used in real signal and image pipelines.
Cornell Notes
Convolution combines two sequences by sliding one against the other, multiplying aligned entries, and summing the products. In probability, it gives the distribution of sums from two independent random variables: each output value is a sum of products over all index pairs that add to the target. In image processing, convolving an image with a kernel produces effects like blurring (e.g., moving averages and Gaussian kernels) and edge detection (kernels with positive/negative weights that cancel on uniform regions). Although direct convolution is O(n²), FFT-based convolution computes the same result in O(n log n) by transforming to frequency-like coordinates using roots of unity, multiplying pointwise, and transforming back.
How does the “sum of products across index offsets” connect dice probabilities to convolution?
Why does a moving average blur data, and what role does the kernel’s weights play?
How can convolution detect edges rather than just blur?
What is the “kernel flip” issue, and why does it matter?
Why is naive convolution O(n²), and how does FFT reduce it to O(n log n)?
Review Questions
- In the dice example, write the probability of getting sum n in terms of two probability lists a and b. What index pairs contribute?
- What properties of a kernel (e.g., sum-to-zero, positive/negative weights) make it suitable for edge detection?
- Why does FFT-based convolution produce the same output as direct convolution even though it avoids the explicit sliding-and-summing step?
Key Points
- 1
Convolution of two discrete sequences produces a new sequence where each output entry is a sum of products over all index pairs that add to a fixed offset.
- 2
Probability distributions of sums of independent discrete variables can be computed via convolution by summing products of aligned probabilities.
- 3
Moving averages and Gaussian blurs are convolution with kernels whose weights sum to 1, producing smoothing by weighted neighborhood averaging.
- 4
Edge detection emerges when kernels include positive and negative weights and often sum to zero, causing uniform regions to cancel while changes produce strong responses.
- 5
Convolution’s output length and the need for padding or cropping depend on the chosen implementation details and the mathematical definition.
- 6
The standard mathematical definition involves flipping the second sequence before sliding; many software functions may hide this by using cross-correlation conventions.
- 7
FFT-based convolution reduces runtime from O(n²) to O(n log n) by transforming inputs at roots of unity, multiplying pointwise, and transforming back.