How (and why) to raise e to the power of a matrix | DE6
Based on 3Blue1Brown's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Matrix exponentiation is defined by the Taylor series exp(A)=I + A + A^2/2! + …, using matrix powers and matrix addition term-by-term.
Briefing
Matrix exponentiation—written as e^(At)—turns out to be a precise way to solve systems of differential equations where a state changes at a rate proportional to a matrix times the state. That matters because many real problems in science and engineering (and especially quantum mechanics) can be written in the form v'(t)=A v(t). Instead of guessing solutions, e^(At) packages the long-term evolution from time 0 to time t into a single matrix, so multiplying e^(At) by an initial condition vector produces the full trajectory.
The operation starts with a definition that looks like “plugging a matrix into the exponential,” but it’s not arbitrary. For real numbers, e^x is defined by its Taylor series; the matrix version uses the same infinite polynomial, term by term: exp(A)=I + A + A^2/2! + A^3/3! + … . This requires A to be square so that powers like A^2, A^3, and so on are well-defined via repeated matrix multiplication. Adding matrices works term-by-term as well, so the Taylor-series construction makes sense as a formal infinite sum—at least in cases where it converges.
A concrete example makes the definition feel less like notation abuse. Take the 2×2 matrix with −π and π on the off-diagonal: [[0, −π],[π, 0]]. When its Taylor-series exponential is computed, the sum approaches −I, the negative identity matrix. That result isn’t a coincidence: it’s the matrix analogue of Euler’s identity, and it reflects what happens when the underlying matrix represents a 90-degree rotation. Exponentiating a rotation operator for time t generates the rotation by angle t; after π units of time, a 90-degree-per-unit-time rotation becomes a 180-degree flip, which is exactly multiplication by −1.
The “why” becomes clearer through differential equations. The Romeo-and-Juliet relationship model encodes two coupled rates of change: one person’s feelings increase when the other’s decrease, and vice versa. Writing the pair (x(t), y(t)) as a vector v(t) turns the system into v'(t)=M v(t), where M is a specific 2×2 matrix. Geometrically, M acts like a 90-degree rotation, so the velocity vector is always perpendicular to the position vector. That constraint forces circular motion at a constant angular speed, giving explicit solutions that match what e^(Mt) produces.
The same framework scales up. In one dimension, x'(t)=r x(t) has solutions x(t)=x0 e^(rt), showing that the exponential acts on an initial condition. In higher dimensions, the exponential becomes a matrix-valued operator: e^(At) plays the role of “the thing that turns initial data into the evolving state.” A quick calculus check supports this: differentiating the Taylor-series expression for e^(At) yields A times the original expression, so it satisfies v'(t)=A v(t) (with convergence details handled separately).
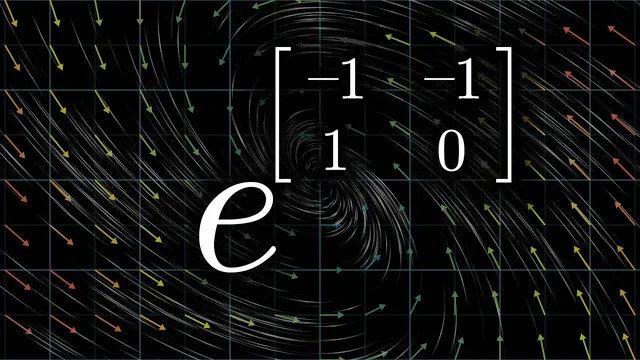
Finally, the discussion connects the idea to quantum mechanics. Schrödinger’s equation has the same structural core—time evolution governed by a matrix acting on a state vector—but the matrix includes the imaginary unit i, which enforces oscillatory behavior. More generally, the evolution can be visualized with a vector field where each point v has velocity Mv; flowing along that field for time t produces the transformation encoded by e^(Mt).
Cornell Notes
Matrix exponentiation defines e^(A) using the same Taylor series that defines the real exponential, replacing powers of a number with powers of a square matrix: exp(A)=I + A + A^2/2! + A^3/3! + … . This construction is not just formal: it solves linear systems of differential equations of the form v'(t)=A v(t). In the Romeo-and-Juliet example, the matrix acts like a 90-degree rotation, so the solution rotates in time; computing e^(Mt) via the Taylor series reproduces the rotation matrix. A key payoff is that e^(At) turns initial conditions into full time evolution: v(t)=e^(At)v(0). The same mechanism underlies time evolution in quantum mechanics, where i introduces oscillations and the “rotation” happens in a space of states or functions.
How is e^(A) defined for a matrix A, and what makes the definition legitimate?
Why does the example with off-diagonal ±π produce −I?
How does e^(At) solve v'(t)=A v(t)?
What does the Romeo-and-Juliet system have to do with rotation?
How does this connect to quantum mechanics and the role of i?
Review Questions
- What conditions must a matrix satisfy for the Taylor-series definition of e^(A) to be meaningful in terms of matrix powers?
- In the rotation example, how does the angle of rotation relate to the exponent parameter t?
- Why does differentiating the Taylor-series form of e^(At) naturally produce the factor A needed for v'(t)=A v(t)?
Key Points
- 1
Matrix exponentiation is defined by the Taylor series exp(A)=I + A + A^2/2! + …, using matrix powers and matrix addition term-by-term.
- 2
For square matrices, powers like A^2, A^3, and so on are defined by repeated matrix multiplication, making the series well-formed.
- 3
The identity exp(Mt) for a 90-degree-rotation generator reproduces rotation by angle t, so exp(Mπ) becomes −I.
- 4
Linear systems v'(t)=A v(t) have solutions v(t)=e^(At)v(0), turning initial conditions into full time evolution.
- 5
Differentiating the Taylor-series expression for e^(At) yields A times the original expression, matching the differential equation’s structure (subject to convergence).
- 6
Coupled differential equations can be visualized with a vector field where each point v has velocity Mv; flowing along the field for time t corresponds to applying e^(Mt).
- 7
Schrödinger’s equation fits the same evolution pattern, with the imaginary unit i driving oscillatory behavior and “rotations” occurring in state/function space.