Manifolds 16 | Smooth Maps (Definition)
Based on The Bright Side of Mathematics's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Smooth maps between manifolds are defined using charts and smooth transition maps, not distances.
Briefing
Smooth maps between manifolds get their meaning from the smooth structures already built into each space. Because manifolds come with charts whose overlaps are related by smooth (diffeomorphic) transition maps, differentiability of a map can be defined by translating everything into Euclidean coordinates, checking differentiability there, and then relying on the transition maps to guarantee the result doesn’t depend on which charts were chosen. This matters because it turns an otherwise “distance-free” notion—differentiation—into a well-defined concept on general manifolds, enabling tools like the regular value theorem in full generality.
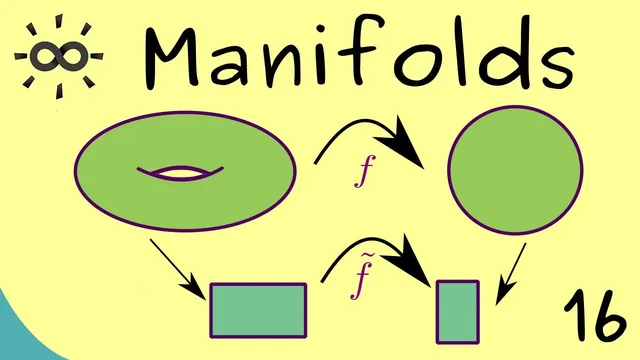
Start with two C∞ smooth manifolds, M and N, and an abstract map F: M → N. Differentiability cannot be defined directly from topology alone, since derivatives require a way to measure change. The workaround is to use charts: pick a chart (H, U) around a point p ∈ M and a chart (K, W) around the image F(p) ∈ N. These charts convert local pieces of M and N into open subsets of R^n, so the question “Is F differentiable at p?” becomes “Is the corresponding Euclidean map differentiable at the corresponding point?”
Concretely, the chart-based Euclidean representative of F is built by composing maps: take H^{-1} to move from coordinates back to M, apply F, then use K to return to coordinates in N. After restricting to suitable subsets of R^n (a technical step to ensure everything is defined), this yields a map between open sets in Euclidean space. Differentiability at p is then defined by requiring that this Euclidean map is K-times differentiable at the coordinate point h(p) (where h is the coordinate map from the chart).
A key subtlety is whether the answer depends on the chosen charts. It does not: if the definition works for one pair of charts, it also works for any other pair. The reason is that transition maps between overlapping charts are diffeomorphisms, hence smooth with smooth inverses. Changing charts amounts to composing with these smooth transition maps, which preserves differentiability order. So the smooth structure “locks in” the notion of smoothness for F, making it intrinsic to the manifolds rather than an artifact of coordinates.
From this point, the definition scales to higher smoothness. F is called K-times differentiable at p if the Euclidean representative is K-times differentiable at the corresponding point. If F is K-times differentiable at every point of M (for a fixed K), then F is a C^K map. In the best case, F is differentiable of all orders at all points—meaning it is C∞ (often just called “smooth”). In notation, smooth maps are written as F ∈ C∞(M, N), and when the codomain is understood (commonly N = R), the notation is simplified accordingly. The next step after defining smooth maps is to look at examples, which is flagged as a topic for a later discussion.
Cornell Notes
Smooth maps between manifolds are defined using the manifolds’ smooth structures, not distances. Given C∞ manifolds M and N and a map F: M → N, differentiability at a point p ∈ M is checked in coordinates: choose charts (H, U) around p and (K, W) around F(p), convert F into a Euclidean map via the composition K ∘ F ∘ H^{-1} (restricted to appropriate subsets), and test K-times differentiability there. The definition is independent of chart choices because transition maps between overlapping charts are diffeomorphisms, so composing with them preserves differentiability. If F is K-times differentiable at every point for all K, then F is C∞ (smooth), written F ∈ C∞(M, N).
Why can’t differentiability be defined purely from the topological structure of manifolds?
How is “F is differentiable at p” turned into a concrete Euclidean question?
What ensures the differentiability definition does not depend on which charts are chosen?
What does “C^K differentiable map” mean in this framework?
When is a map called “smooth” (C∞), and how is it notated?
Review Questions
- Given charts (H, U) and (K, W), write the coordinate expression used to test differentiability of F at p.
- Explain why changing charts does not change whether F is K-times differentiable at a point.
- State the condition for a map to be C∞ and describe the meaning of the notation C∞(M, N).
Key Points
- 1
Smooth maps between manifolds are defined using charts and smooth transition maps, not distances.
- 2
To test differentiability at p ∈ M, convert F into a Euclidean map using charts around p and F(p).
- 3
Differentiability at a point is defined by checking K-times differentiability of the coordinate representative at the corresponding coordinate point.
- 4
The definition is chart-independent because transition maps between overlapping charts are diffeomorphisms.
- 5
F is C^K if it is K-times differentiable at every point of M.
- 6
A map is smooth (C∞) if it is K-times differentiable for every natural number K at every point.
- 7
Smooth maps are commonly denoted as F ∈ C∞(M, N), with simplifications when the codomain is clear.