Manifolds 34 | Examples for Riemannian Manifolds
Based on The Bright Side of Mathematics's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
A Riemannian metric is an inner product on each tangent space that depends smoothly on the point.
Briefing
Riemannian manifolds gain their geometry from a smoothly varying inner product on each tangent space, and the most practical way to build that structure is to start with submanifolds sitting inside Euclidean space. For a submanifold M ⊂ R^N, the surrounding Euclidean (standard) inner product restricts to every tangent space of M, producing a “standard” Riemannian metric. In coordinates coming from a parameterization f, tangent vectors are given by partial derivatives of f, and the metric tensor entries are computed as inner products of these tangent vectors. Concretely, the metric matrix G at a point p is built from G_ij = ⟨∂f/∂x_i, ∂f/∂x_j⟩, which turns lengths and angles on M into computable quantities.
This construction immediately yields familiar formulas for curve length and, in higher dimensions, area. When M is one-dimensional (a curve in R^N), the tangent space is one-dimensional, so the metric reduces to a 1×1 matrix with a single entry G_11. The metric then collapses to the squared Euclidean norm of the derivative of the parameterization: G_11 = ||f′(t)||^2. As a result, the length of the curve from A to B takes the standard Riemannian form: integrate the square root of the metric contribution, which in this case becomes the norm ||f′(t)||. The same general principle scales up: for two-dimensional surfaces, the metric tensor determines the area element through √det(G), even though the full integration details are left for later.
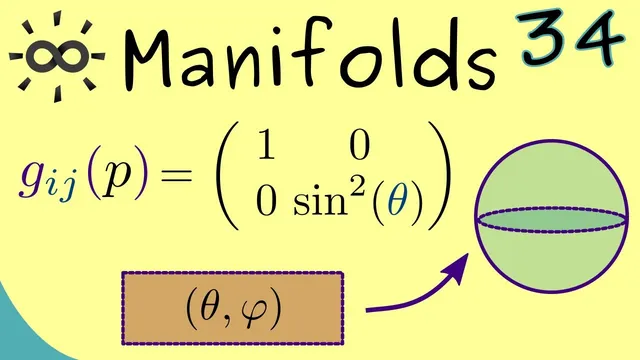
A concrete example makes the method tangible: the sphere S^2 embedded in R^3. Using a spherical-coordinate parameterization with angles θ and φ (radius fixed to 1), the tangent space is spanned by the partial derivatives with respect to θ and φ. Computing inner products of these two tangent vectors produces a 2×2 metric matrix G. After simplifying trigonometric terms, the metric takes a diagonal form with the only nontrivial dependence appearing in the lower-right entry: G = [[1, 0], [0, sin^2(θ)]]. The determinant then becomes det(G) = sin^2(θ), so the area-scaling factor is √det(G) = |sin(θ)|. That square-root-of-determinant factor is highlighted as the key ingredient for the volume form on S^2, which will be used to compute areas and more general integrals.
The takeaway is that Riemannian metrics aren’t just abstract definitions: for embedded submanifolds, they come directly from Euclidean geometry, and the resulting metric tensor controls how integration measures (like area on S^2) scale across the manifold. This also motivates why the framework extends to abstract manifolds—so one can define meaningful “volume” and “area” even when no ambient Euclidean space is available.
Cornell Notes
A Riemannian metric assigns to each point of a manifold an inner product on its tangent space, varying smoothly from point to point. For a submanifold M ⊂ R^N, the standard Euclidean inner product on R^N restricts to tangent spaces of M, giving a canonical Riemannian metric. Using a parameterization f, tangent vectors are partial derivatives of f, and the metric tensor entries are computed as inner products of these derivatives: G_ij = ⟨∂f/∂x_i, ∂f/∂x_j⟩. For curves, this reduces to the familiar length integrand ||f′(t)||. For the sphere S^2 ⊂ R^3 with spherical coordinates (θ, φ), the metric becomes diag(1, sin^2(θ)), so √det(G) = |sin(θ)| supplies the area-scaling factor used in the manifold’s volume form.
How does a submanifold M ⊂ R^N automatically inherit a Riemannian metric?
Given a parameterization f of a submanifold, how is the metric tensor G computed?
Why does curve length in R^N involve ||f′(t)||?
What metric tensor arises on the sphere S^2 ⊂ R^3 using spherical coordinates?
How does √det(G) connect to area on S^2?
Review Questions
- For a submanifold M ⊂ R^N parameterized by f(x_1,…,x_n), what is the formula for G_ij in terms of partial derivatives and the Euclidean inner product?
- In the sphere example with coordinates (θ, φ), why does the metric tensor become diagonal, and what is the nontrivial entry?
- What quantity derived from the metric tensor determines the area-scaling factor on a 2D Riemannian manifold?
Key Points
- 1
A Riemannian metric is an inner product on each tangent space that depends smoothly on the point.
- 2
For submanifolds M ⊂ R^N, the Euclidean inner product restricts to tangent spaces, giving a canonical metric.
- 3
With a parameterization f, tangent vectors are partial derivatives of f, and the metric tensor is built from their inner products: G_ij = ⟨∂f/∂x_i, ∂f/∂x_j⟩.
- 4
On curves, the metric reduces to a single value G_11 = ||f′(t)||^2, so length uses the integrand ||f′(t)||.
- 5
On surfaces, the metric tensor determines the area element through √det(G).
- 6
For S^2 ⊂ R^3 in spherical coordinates, the metric tensor is diag(1, sin^2(θ)), making √det(G) = |sin(θ)|.
- 7
The square-root-of-determinant factor is the core ingredient behind the volume form used for integrating on manifolds.