The Physics of Euler's Formula | Laplace Transform Prelude
Based on 3Blue1Brown's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Exponentials e^(st) are special because differentiation multiplies them by s, letting time dependence factor out and leaving algebra in s.
Briefing
The core insight is that exponentials of the form e^(st) aren’t just convenient guesses for differential equations—they encode the relationship between a system’s position and its velocity, and that relationship naturally extends to complex values of s. Once that link is understood, Euler’s formula and the “bizarre” appearance of complex numbers become a practical tool for modeling oscillation, damping, and even forced motion in physics.
The lesson begins with the defining property of the exponential: e^t differentiates to itself. Reading this dynamically turns calculus into motion. If x(t)=e^t, then velocity equals position at every moment, and since e^0=1, the motion starts at 1 and accelerates to the right. Changing the exponent to e^(2t) scales the derivative by 2, so velocity is always twice position. A negative constant like e^(-0.5t) flips the direction and shrinks the velocity magnitude, producing exponential decay.
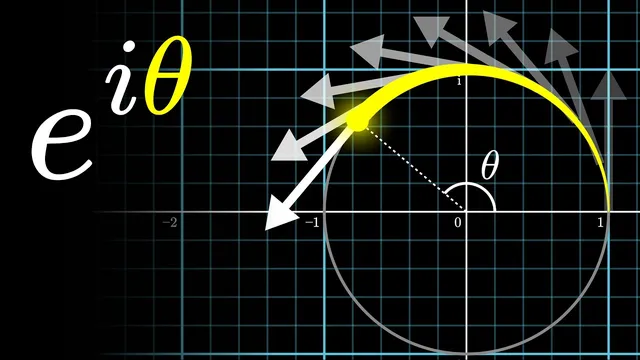
The “fun part” arrives when the constant becomes imaginary: x(t)=e^(it). The derivative becomes i times the function, and multiplying by i corresponds to a 90° rotation in the complex plane. That forces velocity to stay perpendicular to position, which uniquely matches circular motion. With the initial condition x(0)=1, the point moves around a unit circle at one unit of arc length per unit time, so after π units of time it lands halfway around—yielding the famous result e^(πi)=-1. The notation is also demystified: e^(πi) is computed via the Taylor series for e^x, where powers of i rotate by 90° each time and the series converges to -1. Still, the geometric “derivative equals rotated position” viewpoint is presented as the more useful mental model.
From there, the parameter s is treated as a coordinate on the complex “S-plane.” Purely imaginary s=iω sets angular frequency: e^(iωt) oscillates, and changing ω changes the rotation rate. When s has both real and imaginary parts, such as s=-0.5+i, the real part dictates exponential growth or decay while the imaginary part dictates oscillation. Geometrically, multiplication by a complex number becomes a combination of rotation and stretching, so the motion becomes a spiral: oscillations whose amplitude shrinks when the real part is negative and grows when it is positive.
That framework is then connected to physics through the damped harmonic oscillator. Starting from Newton’s second law with a spring force proportional to displacement (k x) and a damping term proportional to velocity (μ ẋ), the differential equation is solved using the “guess” x(t)=e^(st). Derivatives simply pull down factors of s, turning the differential equation into an algebraic equation for s. With no damping, the roots are purely imaginary, leading to oscillatory solutions; real-valued motion comes from combining complex exponentials into sine/cosine forms. With damping, the roots move off the imaginary axis into the left half-plane, producing decaying oscillations; enough damping yields the overdamped regime where oscillation disappears.
Finally, the motivation for Laplace transforms is made explicit. For higher-order linear differential equations, the same exponential-substitution trick reduces the problem to finding roots of a polynomial in s, and the fundamental theorem of algebra guarantees complex roots. But real-world systems often include forcing terms, breaking the simple “free coefficients” structure. The forced oscillator leads to solutions built from specific exponentials with constrained coefficients—exactly the kind of structure Laplace transforms are designed to uncover. The promise for the next chapters is that Laplace transforms translate differentiation into multiplication by s in a new algebraic language, turning differential equations into solvable algebra.
Cornell Notes
Exponentials of the form e^(st) act like “atoms” for differential equations because differentiating them multiplies by s. Treating s as complex turns that multiplication into geometric rotation and stretching in the complex plane: purely imaginary s produces circular motion (oscillation), while a real part adds exponential growth or decay, creating spirals. The damped harmonic oscillator demonstrates the payoff: substituting x(t)=e^(st) converts the differential equation into an algebraic equation for s, whose roots determine whether motion oscillates, decays, or becomes overdamped. Real-valued physical solutions come from combining complex exponentials into sine/cosine forms. This sets up Laplace transforms as the systematic tool for finding the exponential components and coefficients when forcing terms make the naive guessing strategy fail.
Why does e^(st) matter so much for differential equations?
How does multiplying by i explain Euler’s formula e^(πi)=-1?
What does the S-plane (complex s) tell you about motion?
How does the damped harmonic oscillator connect to complex exponents?
Why can’t forced oscillators be solved by the same “free exponential guess” approach?
Review Questions
- How does the property x(t)=e^(st) → x'(t)=s e^(st) turn a differential equation into an algebra problem?
- In the S-plane, what roles do Re(s) and Im(s) play in determining whether motion oscillates and whether its amplitude decays or grows?
- For the damped harmonic oscillator, what qualitative change occurs when damping is increased enough to reach the overdamped regime?
Key Points
- 1
Exponentials e^(st) are special because differentiation multiplies them by s, letting time dependence factor out and leaving algebra in s.
- 2
Complex s turns differentiation into geometry: multiplying by i rotates by 90°, so e^(it) forces velocity to be perpendicular to position and produces circular motion.
- 3
Purely imaginary s yields oscillation, while a nonzero real part adds exponential growth or decay, turning circles into spirals.
- 4
Real-valued physical solutions for oscillators come from combining complex exponentials into sine/cosine forms, with coefficients set by initial conditions.
- 5
For the damped harmonic oscillator, solving for s determines whether motion oscillates, decays, or becomes overdamped.
- 6
In forced systems, solutions still involve exponentials, but forcing constrains coefficients—motivating Laplace transforms as the systematic tool.
- 7
Laplace transforms are positioned as a method that translates differentiation into multiplication by s in a new algebraic framework, making differential equations solvable like algebra.