Visualizing the 4d numbers Quaternions
Based on 3Blue1Brown's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
Quaternions extend complex numbers by adding three perpendicular imaginary units i, j, and k, giving each quaternion four real degrees of freedom.
Briefing
Quaternions are a four-dimensional number system whose multiplication can be visualized as a pair of synchronized 90-degree rotations on a hypersphere—an intuition that turns otherwise opaque algebra into a concrete geometric action. The payoff is practical: quaternions efficiently and stably encode 3D orientation for graphics, robotics, and even connect to how quantum two-state systems are modeled. The central move is to build that intuition step-by-step, starting from complex numbers and then scaling up to quaternions using stereographic projections.
The story begins with Hamilton’s historical breakthrough: he sought a number system for 3D space analogous to complex numbers for 2D, and in 1843 realized the needed extension wasn’t one extra imaginary dimension but three—imaginary units perpendicular to each other plus a real part. Afterward, quaternions faced resistance from mathematicians who found quaternion multiplication confusing, with period mockery so strong it’s even linked to cultural references like the Mad Hatter scene. A century later, computing revived quaternions because they compute 3D rotations efficiently and reduce numerical error compared with other approaches.
To make quaternion multiplication intuitive, the explanation uses two “learners.” Linus the Linelander starts with one-dimensional real numbers and is taught complex multiplication geometrically. Complex numbers are written as a real part plus an imaginary part times i, with i² = −1. Multiplying by a complex number of unit magnitude corresponds to pure rotation on the unit circle. Since Linus can only see a line, the unit circle is mapped to a line via stereographic projection: points on the circle become points on the line, with −1 treated as a point at infinity. Under this mapping, multiplying by i produces a characteristic “morphing” motion of the projected line—sending 1 to i, i to infinity, infinity to −i, and −i back to 1.
Next comes Felix the Flatlander, who can see two dimensions and is taught rotations of a sphere. The unit sphere in 3D is projected into a plane using a stereographic projection from a “south pole” point at −1. Crucially, the unit circle in the projection plane stays fixed under the mapping, while other points warp inward or outward depending on hemisphere. Rotations about axes become rigid motions on the sphere, but appear as transformations (like swapping a unit circle with a perpendicular line) in the projected view.
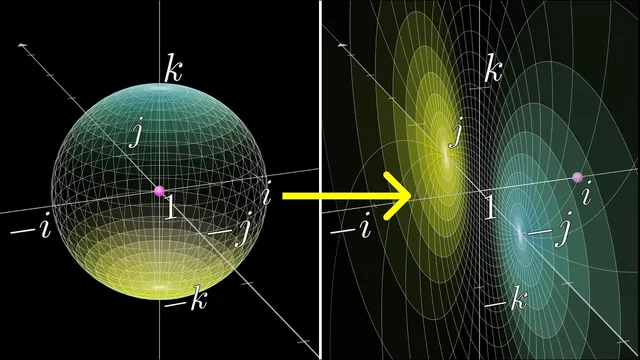
Quaternions extend this pattern again: each quaternion has a real scalar part plus three imaginary components i, j, k, with i, j, k mutually perpendicular. Quaternion multiplication is defined by rules for how these units multiply, and it can be computed efficiently because it distributes like algebra. Geometrically, multiplying by a quaternion scales by its magnitude and then performs a special 4D rotation. Those pure-rotation quaternions live on a 3D hypersphere of unit quaternions. Stereographic projection maps that hypersphere into ordinary 3D space, where a sphere passing through i, j, k remains the unwarped “fixed” region.
The key visualization: left-multiplying by i rotates two perpendicular circles on that projected hypersphere in sync—one circle (through 1 and i) moves by 90 degrees, while the perpendicular circle (through j and k) rotates by the same amount according to a right-hand rule, sending j→k→−j→−k→j. The same logic generalizes: for any unit quaternion q, the circle through 1, q, and −1 is rotated so that 1 lands at q, and the perpendicular circle rotates by the same angle using the right-hand rule. Order matters because quaternion multiplication is non-commutative (i·j = k but j·i = −k), mirroring how sequences of 3D rotations don’t commute.
Finally, the explanation distinguishes left multiplication from right multiplication, swapping which hand’s curl corresponds to the perpendicular-circle rotation. Converting these hypersphere motions into actual 3D rotations requires conjugation—a step saved for a follow-on video—so the current focus stays on the geometric engine behind quaternion multiplication itself.
Cornell Notes
Quaternion multiplication becomes intuitive when treated as a 4D geometric rotation on the hypersphere of unit quaternions. The method mirrors earlier lessons: complex numbers act as rotations on a unit circle, and stereographic projection lets a 1D “learner” see those rotations as motions on a line; then a 2D “learner” sees sphere rotations via stereographic projection. For quaternions, stereographic projection maps the unit hypersphere into 3D space, where a fixed sphere passing through i, j, k represents the unwarped unit-quaternion region. Left-multiplying by a unit quaternion rotates two perpendicular circles in sync: the circle through 1 and q moves so 1 lands at q, while the perpendicular circle rotates by the same angle using a right-hand rule. Non-commutativity (i·j = k but j·i = −k) follows naturally from the order-dependent rotation sequence.
How does stereographic projection turn “rotation” into something a lower-dimensional learner can visualize for complex numbers?
Why does the “unit circle stays fixed” idea matter when moving from complex numbers to 3D rotations?
What is the geometric meaning of quaternion multiplication by a unit quaternion?
How does left-multiplication by i rotate the two perpendicular circles, and what rule determines the direction?
Why is quaternion multiplication non-commutative, and how is that connected to 3D rotation order?
What changes when thinking about multiplication from the right instead of the left?
Review Questions
- In the complex-number stereographic projection, where does −1 go, and how does multiplying by i move the projected points 1, i, and −i?
- For left-multiplication by i, what are the two circles being rotated, and what mapping does it produce for j and k?
- How does the geometric reason for non-commutativity (i·j ≠ j·i) mirror the non-commutativity of sequential 3D rotations?
Key Points
- 1
Quaternions extend complex numbers by adding three perpendicular imaginary units i, j, and k, giving each quaternion four real degrees of freedom.
- 2
Unit quaternions act as pure 4D rotations on the hypersphere of radius 1; non-unit quaternions also scale by their magnitude.
- 3
Stereographic projection is the visualization tool that maps the unit hypersphere of quaternions into 3D space while keeping a key sphere (through i, j, k) as an unwarped reference region.
- 4
Left-multiplying by a unit quaternion rotates two perpendicular circles in sync: the circle through 1 and q moves so 1 lands at q, and the perpendicular circle rotates by the same angle via a right-hand rule.
- 5
Quaternion multiplication is non-commutative; swapping factors changes the resulting rotation (e.g., i·j = k but j·i = −k).
- 6
Thinking about right multiplication instead of left multiplication flips the handedness convention for the perpendicular-circle rotation.
- 7
Turning quaternion actions into actual 3D rotations requires conjugation, saved for a follow-on explanation.