Why Is MIT Making Robot Insects?
Based on Veritasium's video on YouTube. If you like this content, support the original creators by watching, liking and subscribing to their content.
At insect scale, surface-area-to-volume ratio drives much higher drag and reduces inertia, making rapid flapping essential for lift rather than gliding.
Briefing
MIT’s micro-robotics push is less about building “cool insect copies” and more about solving a stack of physics and engineering problems that only show up when machines shrink to bee-size and below. At that scale, air drag, surface tension, power delivery, and even battery packaging behave differently—so the path to flight, swimming, jumping, and controlled motion requires insect-inspired mechanisms and unconventional power sources. The payoff is practical: robots that can inspect engines, search disaster rubble, and potentially operate in low-gravity environments—without needing the bulky, failure-prone designs that have historically hampered rescue efforts.
A central theme is how scale changes the rules of motion. Small flyers have far higher surface-area-to-volume ratios, which increases drag and reduces the inertia that lets larger animals glide. That’s why bees and other insects flap rapidly: wing motion generates vortices and low-pressure zones above the wing while higher pressure below provides lift. MIT’s RoboBees also borrow aerodynamic tricks from nature—maple tree seeds that spin while falling. Their shape creates swirling vortices near the leading edge, and adding miniature electric rotors at the wingtips can provide enough lift to transition from falling to powered flight.
But shrinking creates new bottlenecks. Surface tension traps tiny robots at the water’s surface, making “just swim” impossible. MIT demonstrates multiple escape routes. One yellow submarine-like robot flaps wings to move on land and underwater, but when it’s stuck at the surface, it splits water into hydrogen and oxygen, stores the gases in a buoyancy chamber, then ignites them so an explosion breaks the surface layer and launches the robot upward before it can fly. Another design uses water-repellent copper pads: applying 600 volts charges the pads to attract water molecules, breaking the hydrophobic barrier so the robot can sink on command and then walk underwater.
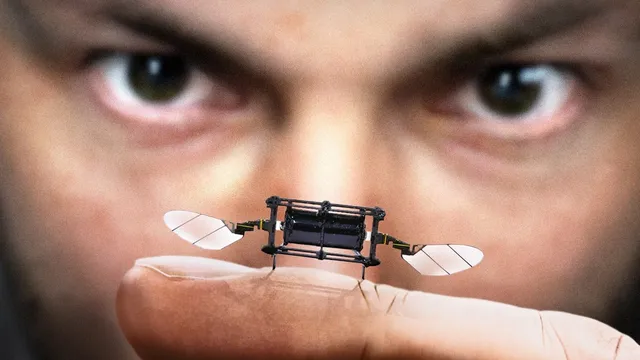
Power and durability are equally decisive. Early RoboBees used piezoelectric crystals to drive wing flapping, but the crystals were fragile—impacts could crack them and stop the robot. MIT’s newer approach replaces piezos with soft polymer “muscles” coated with carbon nanotubes that act like tiny actuators when voltage cycles pull and release the polymer. These muscles can stretch up to 25% of their length, flap around the 400 hertz range, and keep working through bumps and scrapes. If pierced, the carbon nanotubes can short; MIT addresses this with self-healing by burning off the shorted nanotubes and even a laser-assisted clearing process to isolate defects.
For energy limits, MIT also highlights a jumping strategy: hopping can conserve power compared with continuous flight. Separately, a cockroach-inspired inspection robot called HAMR uses voltage-controlled adhesion to stick to metal surfaces and move through tight spaces, aiming to detect turbine cracks that are otherwise expensive and slow to inspect.
Finally, MIT tackles the battery problem with a “tiny combustion engine” concept: a penny-sized unit runs on a continuous stream of methane and oxygen, ignites it, and uses expanding hot gases to push a flexible polymer membrane like a piston. The design relies on heat loss at small scales so flames don’t travel back through fuel lines. With enough thrust for jumping and carrying significant payload relative to mass, these micro-engines point toward longer-lasting robots that can carry sensors and communication hardware—while the lab keeps the emphasis on fundamental curiosity as much as on applications.
Cornell Notes
MIT’s micro-robot work targets the physics that dominate at bee-size and below: high drag from large surface-area-to-volume ratios, water’s surface tension, and power delivery that batteries struggle to scale. RoboBees and other tiny flyers rely on insect-like lift mechanisms—vortices and low-pressure zones from rapid wing flapping—and even borrow from maple seed aerodynamics to generate lift. Water-trapped robots escape surface tension using either gas generation and ignition (to break the surface layer) or voltage-controlled changes to hydrophobic copper pads (to sink on command). Durability and actuation shift from fragile piezoelectric crystals to carbon-nanotube-coated soft polymer muscles that can self-heal after damage. The broader goal is practical autonomy for inspection and search, supported by alternative power sources such as tiny combustion engines.
Why do tiny robots need to flap so fast instead of gliding like larger flyers?
How do MIT’s water-walking robots avoid getting stuck at the water’s surface?
What changed in RoboBee actuation from piezoelectric crystals to soft polymer muscles?
How do the carbon-nanotube muscles recover after being pierced or shorted?
What is the role of jumping in extending flight time for tiny robots?
Why consider tiny combustion engines instead of scaling down electric motors or batteries?
Review Questions
- What physical effects at small scales increase drag and prevent gliding, and how do bees’ wing motions counteract them?
- Compare the two approaches MIT uses to break through water’s surface tension—what triggers the transition from trapped to submerged?
- How do carbon-nanotube polymer muscles differ from piezoelectric crystals in both performance and damage tolerance?
Key Points
- 1
At insect scale, surface-area-to-volume ratio drives much higher drag and reduces inertia, making rapid flapping essential for lift rather than gliding.
- 2
Water’s surface tension can trap micro-robots; MIT demonstrates breaking that barrier via gas ignition or voltage-controlled changes to hydrophobic surfaces.
- 3
RoboBees’ lift can be inspired by maple seed aerodynamics, where shape-induced vortices and spinning generate lift during descent.
- 4
Actuation durability matters as much as thrust: carbon-nanotube-coated soft polymer muscles replace fragile piezoelectric crystals and can self-heal after shorts.
- 5
Voltage-controlled adhesion enables cockroach-inspired robots like HAMR to stick to metal surfaces and inspect turbine components in tight spaces.
- 6
Energy constraints at tiny scales push designs toward hopping and toward alternative power sources like micro-combustion rather than relying solely on batteries.
- 7
Micro-engineering at these sizes requires extreme precision (components within microns) and specialized lab infrastructure for flight testing.